Die menschliche Hand ist ein Wunderwerk der Natur, ihr Nachbau eine technische Herausforderung ersten Ranges. Egal ob mechanisch oder pneumatisch angetrieben, machen Roboterhände erst richtig bewusst, welch hoch komplexes und emotional bedeutsames „Werkzeug“ der Mensch eigentlich besitzt.
Stellen Sie sich vor, Sie stehen einem Roboter gegenüber. Würden Sie dem Roboter die Hand schütteln? Würden Sie tatsächlich Ihre Hand in die Hand des Roboters legen? Wie würde sich diese Hand anfühlen – die Oberfläche, der Druck, wie die Bewegung?Hände sind die wichtigsten Elemente, mit denen ein menschenähnlicher Roboter mit uns in Kontakt tritt. Wir machen dabei das Gleiche wie beim Kontakt mit Menschen und blicken unwillkürlich als Erstes ins Gesicht. Doch um die Absichten unseres Gegenübers zu erahnen, müssen wir auch die Hände betrachten. Denn egal ob freundlich oder unfreundlich, das Gesicht kann uns nicht anfassen. So beobachten wir unbewusst die Bewegungen der Hände: Sind sie ruckartig oder gleichmäßig, schnell oder gemächlich, chaotisch oder vorhersehbar? Vor allem – greifen diese Hände nach uns?
Für uns Menschen sind Hände das, womit wir aktiv auf unsere Umgebung einwirken und dabei gleichzeitig Informationen erlangen. Das macht Hände zu unserem wichtigsten „Werkzeugen“ und „Sensoren“. Wenn wir nach dem Roboter greifen und eine Hand des Gerätes schütteln, erfahren wir vieles, wie etwa die Glätte der Kunststoff-Oberfläche oder den Widerstand der Gelenke beim Bewegen. Andere Menschen, die uns dabei beobachten, können unsere Handbewegungen „lesen” und dabei einige unserer Erfahrungen mitvollziehen. Gerade weil humanoide Roboter nach dem Vorbild von Menschen gebaut werden, sind die robotischen Hände für sie, wie die menschlichen Hände für uns, unumgänglich für das Ausführen wichtiger „Handlungen“, wobei sie andauernd empfinden und „sprechen”.
Gewordene Hände
Unter all den Gliedmaßen der Lebewesen sind menschliche Hände ohnegleichen. Probieren Sie es aus! Erstens kann der Daumen alle anderen Finger an allen ihren Gliedern berühren. Auch umgekehrt können die Finger jedes Glied des Daumens separat berühren. Somit ist der Daumen nicht nur Gegenspieler jedes einzelnen Fingers, sondern auch der Hand als Ganzes – wohingegen die einzelnen Finger ihre Gegenspieler in der gegenüberliegenden Hand und in deren Fingern haben. Humanoide Affen können das nur zum Teil. Sehr wichtig für die Geschicklichkeit unserer Hand ist, dass der Daumen weit rotieren kann. Zweitens rotieren auch alle anderen Finger in kleinen Winkeln, besonders wichtig ist dies beim Zeigefinger. Denn wenn Daumen und Zeigefinger zueinander rotieren, kann eine Hand mit sehr hoher Präzision greifen. Ein weiterer Effekt dieser kleinen, feinen Rotationen der Gelenke ist, dass wir alle Finger diagonal über die Handfläche hin zum Daumen krümmen und so nicht nur mit großer Kraft zupacken, sondern sogar unseren Arm verlängern können. Auch das ist Menschenaffen anatomisch nicht möglich. Wenn sie etwa einen Stock als Werkzeug verwenden, werden sie ihn immer nur quer zum Unterarm führen können. Damit können wir grundlegend wirksamere Werkzeuge einsetzen als unsere nächsten Verwandten und nur wir können die Hand zur Faust ballen. Durch diesen Kniff lässt uns unsere Anatomie bestimmte Objekte, die in unserer Welt vorkommen, als enorme Erweiterung von Bewegungsraum und Steigerung von Kraftauswirkung verwenden. Drittens haben wir mit unseren nächsten Verwandten gemein, dass wir unsere Hände an den Handgelenken nach außen abwinkeln können. Aber die Kombination der erhöhten Kraft und Beweglichkeit lässt uns Bewegungen wie Klopfen, Stechen und Werfen viel kräftiger und genauer ausführen.
Soweit uns bisher Lebewesen bekannt sind, stellt die menschliche Hand das komplexeste „Instrument“ dar, das sich entwickelt hat.
Gemachte Hände
Dieses „Instrument“ ist in Jahrmillionen auf evolutionäre Weise entstanden. Es regt schon seit Langem dazu an, als ein Gebilde von Menschenhand nachgebaut zu werden. Zu diesem Zweck wird die Komplexität einer menschlichen Hand auf ein „Instrument“ reduziert. Wie und was zu vereinfachen ist, wird durch das Abwägen der Funktionen der robotischen Hand, den technischen Möglichkeiten und den Kosten entschieden. Deshalb baut man für unterschiedliche Roboter verschiedene Arten von Händen.
Aus diesem Grund ist es wichtig, dauernd neue technische Möglichkeiten zu erfinden, um eine möglichst hohe Qualität des zu entwickelnden „Instruments“ Hand zu erreichen. Also kommen in der Robotik nur allerneueste Technologien zum Einsatz – vermutet man.
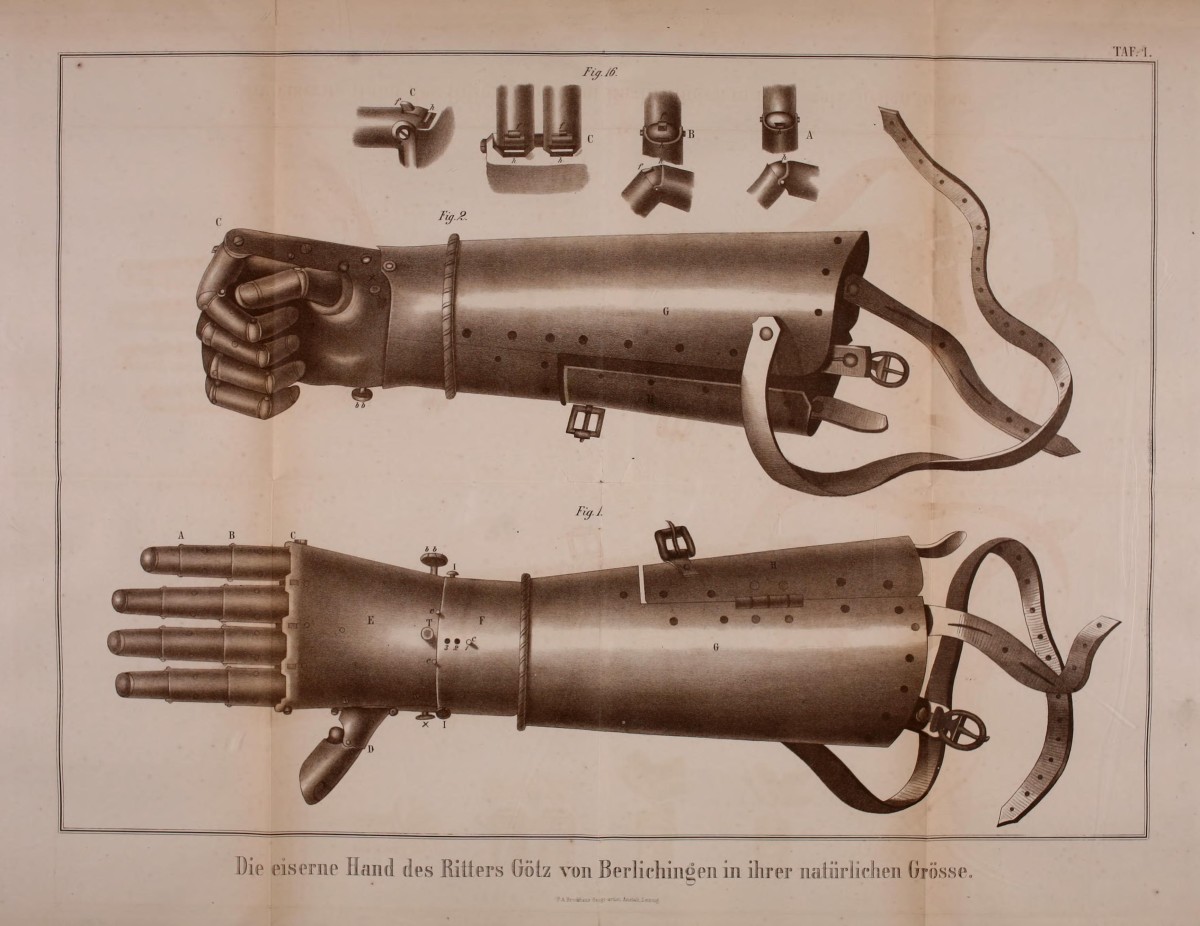
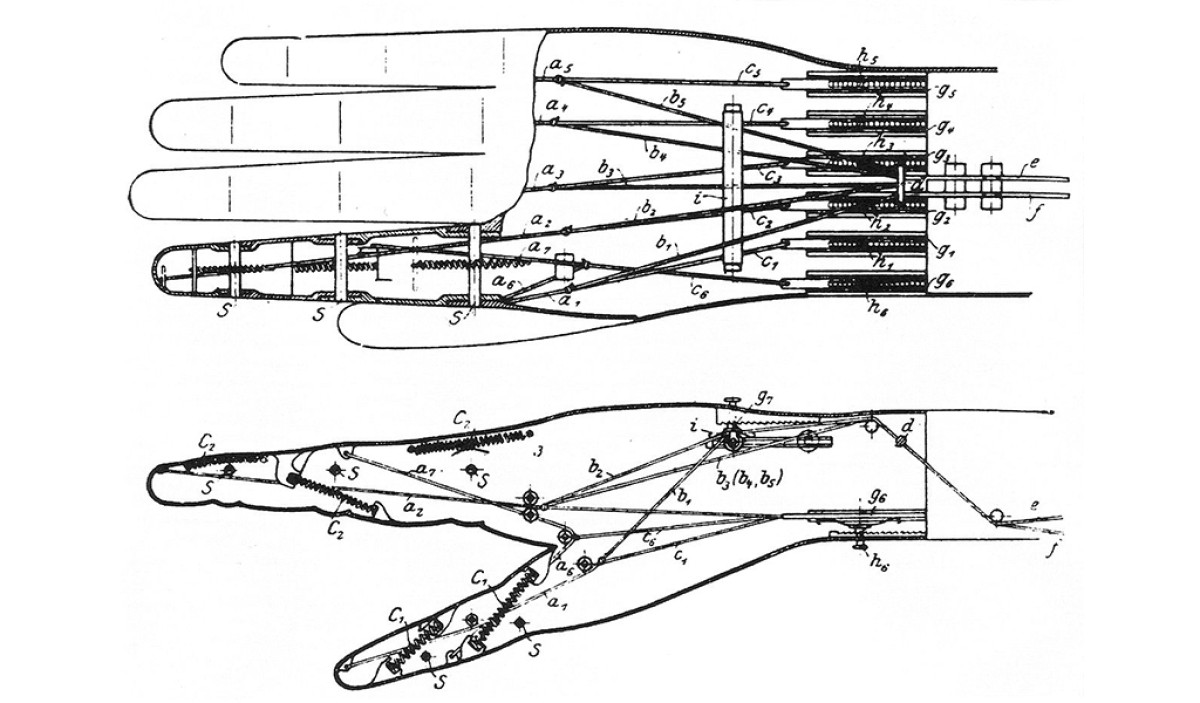
So erscheint es unglaublich, dass die gleiche Idee, die schon Leonardo da Vinci beim Bau des ersten Roboters der Neuzeit um 1495 verwendete, auch heute Stand der Technik ist. Leonardo baute seinen Automaten in eine Ritterrüstung ein. Dieser Roboter-Ritter konnte aus dem aufrechten Sitz aufstehen. Außerdem soll das Gerät seine Arme so bewegt haben, dass es einen Menschen zur Begrüßung umarmen konnte. Dabei bewegte es auch den Kopf, um sein Visier zu öffnen. Dieser Roboter war aus Holz, Messing und Leder gefertigt, durch Seile gesteuert und angetrieben. Die Bewegungen wurden durch eine raffinierte Anordnung von Flaschenzügen angetrieben. Leonardo war von seinen Studien des menschlichen Körpers und von der Mechanik der Seilzüge seiner Zeit inspiriert. Um zu verstehen, wie Sehnen und Muskeln funktionieren, kann man sie vereinfacht als Seilzüge betrachten. Die Hände seines Roboters konnten bereits als Ganzes im Handgelenk gedreht werden. Weitere Bewegungsfreiheit erreichte Leonardo, indem die Hände noch zusätzlich über Schulter- und Ellbogengelenke zueinander bewegt werden konnten.